 当前位置:
当前位置:、功率驱动器和电机本身三个部分。负责接收命令信号,并生成相应的控制信号;功率驱动器将控制信号放大后传输给电机;电机根据控制信号产生相应的运动。同时,电机上的将电机的实际状态反馈给驱动器,驱动器将实际状态与命令状态进行比较,并调整控制信号以纠正任何偏差。
伺服电机驱动器广泛应用于各种需要高精度定位和运动的场合,如数控机床、机器人、包装机械、电子设备等。由于伺服电机驱动器能够实现高精度的位置和速度控制,因此在制造业、航空航天、医疗器械等领域中有着广泛的应用。此外,伺服电机驱动器还可以用于实现电机的调速、过载保护、自动跟踪等功能,提高设备的自动化和智能化水平。
总之,伺服电机驱动器是一种重要的电子设备或电路,能够实现高精度的位置和速度控制,广泛应用于各种领域中。
伺服电机用于精确控制角度或线性位置、速度和加速度。这些伺服电机被称为旋转执行器或线性执行器。伺服系统可以包含用于位置反馈的传感器和用于位置控制的信号输入。伺服电机有不同的尺寸和额定电压。所有伺服电机的工作方式相同,但输出量取决于尺寸和规格。
这里以亚微型伺服电机为目标设备,我们为该电机开发了伺服电机驱动电路。伺服电机广泛用于不同类型的应用,适合基于运动或旋转的机电一体化需求。
该电路的目的是给出PWM(脉冲宽度调制)信号输出,利用这种不同占空比的PWM脉冲,我们可以控制伺服电机的旋转和位置。
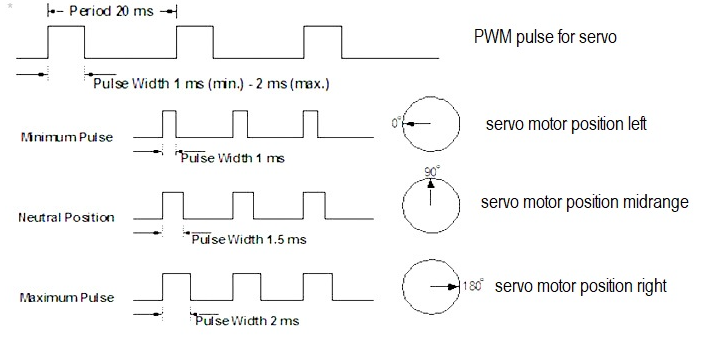
此图用于了解基于 PWM 信号的伺服旋转。考虑周期为 20ms 的信号,高脉冲持续时间为 1ms(最小值)和 2ms(最大值),取决于 HIGH 脉冲信号持续时间伺服电机旋转的变化。
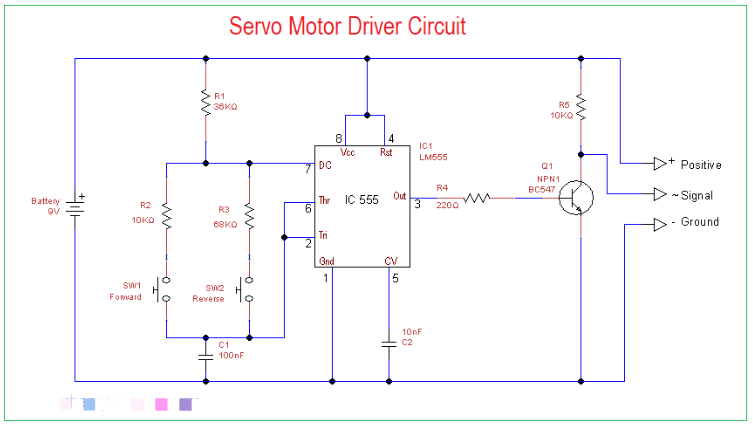
这里定时器IC 555用作非稳态多谐振荡器,它在输出时产生具有两个不同脉冲持续时间的脉冲,我们知道555中的输出脉冲时间取决于定时电阻器和定时电容器。
这里 RA 是 R1电阻器,RB 是 R2 或 R3,具体取决于按下的按钮 (SW),仅适用于该电路。
当开关SW1闭合时,555定时器IC产生长持续时间高脉冲,舵机朝正确方向旋转。当开关SW2闭合时,555定时器IC产生短持续时间的高脉冲,舵机向左方向旋转。
伺服电机广泛应用于机器人、工业、计算机、门、玩具等领域。但与一般直流电机不同的是,我们可以控制伺服电机的角度。使用该电机可以实现更精确的运动。但伺服系统需要特殊的电路才能运行。这就是上述伺服电机驱动电路发挥作用的地方,该电路使用 IC 555 来执行这项工作。
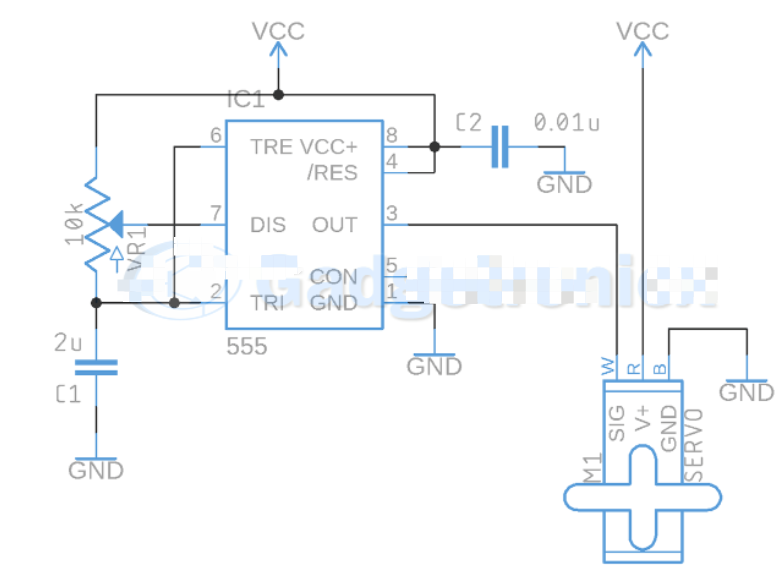
伺服电机无非是一种可以通过控制信号调整其位置的直流电机。在这里,我们需要将 GND 和电压源连接到电机,并构建一个电子电路来向电机提供控制信号。这使我们能够控制电机。为此,伺服电机使用 PWM 信号来调整其位置,因此我们使用配置为 Astable Multivibrator的 555 定时器。在这个 Astable 配置中,我们使用电位器来生成 20ms 时间周期的 PWM 信号。
我们选择 10k 欧姆的电位器。如果我们将电位计设置为最大 10kOhm,则意味着我们将需要一个 2uF电容器,因此我们现在可以调整 PWM 的占空比。这控制了伺服电机的位置,因为 Servo 读取大约 20ms 的 PWM 信号的占空比来调整其位置。 PWM信号ON时间的长短决定舵机转动的角度。因此电位计值的变化将改变输出信号的ON时间段,从而改变旋转角度(45°或90°或180°)。

 one@juli-china.com
one@juli-china.com